Roboter übernehmen künftig Alltagsaufgaben im Büro
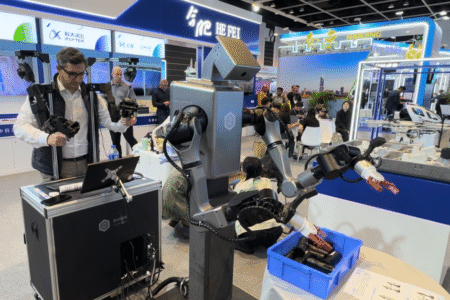
Forschende bei Google (heute Alphabet) sind bei selbstlernenden Robotern für Alltagsaufgaben einen Schritt weiter gekommen: Sie präsentierten Everyday Robots, die z.B. Tische autonom abwischen.

Foto: Everyday Robots / X
Tische im Restaurant abwischen ist nicht gerade ein Traumjob, aber gerade in Pandemiezeiten ist das ein wichtiger Teil der Arbeit des Bedienpersonals in der Gastronomie. Geht es nach den Forschern von Alphabets Entwicklungsabteilung X, dann lässt sich das künftig auch mit mobilen Robotern realisieren. Das berichtet zumindest Hans Peter Brøndmo, Chief Robot Officer bei X, in seinem kürzlich erschienenen Blogbeitrag.
In den vergangenen Jahren hätten sein Team und er erforscht, ob es möglich ist, Robotern beizubringen, Aufgaben in den unstrukturierten Bereichen unseres täglichen Lebens zu erledigen. „Wir stellen uns eine Welt vor, in der Roboter an unserer Seite arbeiten und alltägliche Aufgaben wie Mülltrennung, das Abwischen von Tischen in Cafés oder das Aufräumen von Stühlen in Konferenzräumen erleichtern“, schreibt Brøndmo. Langfristiges Ziel sei es, dass die Roboter Menschen auf vielfältige Weise helfen, z. B. indem sie ältere Personen unterstützen, damit sie länger unabhängig von Hilfspersonal bleiben. „Auch wenn unsere Vorstellung von dieser Welt noch in weiter Ferne liegt, deuten die Ergebnisse unserer jüngsten Experimente darauf hin, dass wir auf dem besten Weg sind, diese Zukunft eines Tages Wirklichkeit werden zu lassen“, erklärt der Roboterexperte.

Diese Entwicklung läuft parallel zur Entwicklung industrieller Lösungen, für die der Technologiekonzern im Sommer die Tochter Intrinsic ausgründete.
Paukenschlag in der Robotik: Google meldet sich mit Intrinsic zurück
Über 100 Prototypen im Praxiseinsatz
Laut Brøndmo erledigt inzwischen eine Flotte von mehr als 100 Roboterprototypen autonom Aufgaben in den Büros seines Unternehmens. Sein Team baut dabei auf Erfahrungen auf, die es bei der Mülltrennung per Roboter gesammelt hat. Hier wurde den Robotern durch Verstärkungslernen (reinforcement learning) und Simulation beigebracht, verschiedene Sorten von Müll per Kamera zu erkennen und per Roboterarm zuverlässig zu sortieren. Durch Training mit dieser Form der Künstlichen Intelligenz konnten die Ergebnisse laut dem Wissenschaftler in den vergangenen Jahren so weit verbessert werden, dass sich sein Team schließlich neuen Aufgaben zuwenden konnte. Das sei mit dem Verfahren möglich gewesen, ohne den Roboter neu zu bauen oder viel Code von Grund auf neu zu schreiben.



Zum jüngsten Ergebnis der Entwicklung schreibt der Norweger: „Derselbe Roboter, der den Müll sortiert, kann jetzt mit einem Wischer ausgestattet werden, um Tische abzuwischen, und mit demselben Greifer, der Tassen greift, kann er lernen, Türen zu öffnen.“ Nun erfolge der nächste Schritt. Die mobilen, lernfähigen Roboter werden die Rapid-Prototyping-Umgebung von X verlassen und die Pilotprojekte auf einige Standorte in der Bay Area von Google erweitert. „Wir werden auch das ‚Projekt‘ aus unserem Namen streichen und uns nun Everyday Robots nennen“, kündigte der Roboterexperte an.

Einsatz verschiedener Lerntechniken
Zu den technischen Hintergründen, die das heute ermöglichen, berichtet er: „In den letzten Jahren haben wir ein integriertes Hardware- und Softwaresystem entwickelt, das auf das Lernen ausgelegt ist – einschließlich der Übertragung des Gelernten aus der virtuellen Welt in die reale Welt. Unsere Roboter sind mit einer Mischung aus verschiedenen Kameras und Sensoren ausgestattet, um die Welt um sie herum zu erfassen. Mithilfe einer Kombination aus maschinellen Lerntechniken wie verstärkendem Lernen, kollaborativem Lernen sowie Lernen durch Demonstration haben die Roboter ein immer besseres Verständnis der Welt um sie herum erlangt und werden immer geschickter bei der Ausführung alltäglicher Aufgaben.“
Wie das funktioniert verdeutlicht ein Video, das in dem Blogbeitrag zu sehen ist.
Den Fortschritt bei dieser Entwicklung macht Brøndmo mit einem Rückblick deutlich: „Im Jahr 2016, als wir noch nicht mit Simulationen arbeiteten, sondern mit einer kleinen Laborkonfiguration von Industrierobotern lernten, wie man kleine Objekte wie Spielzeug, Schlüssel und alltägliche Haushaltsgegenstände greift, brauchte ein Roboter vier Monate, um einen einfachen Griff mit einer Erfolgsquote von 75 % zu lernen.“ Heute lerne ein einziger Roboter eine komplexe Aufgabe wie das Öffnen von Türen mit einer Erfolgsquote von 90 % in weniger als einem Tag Praxiserfahrung. „Noch spannender ist, dass wir gezeigt haben, dass wir auf den Algorithmen und den Erkenntnissen aus dem Öffnen von Türen aufbauen und sie auf eine neue Aufgabe anwenden können: das Aufstellen von Stühlen in unseren Cafés. Diese Fortschritte geben uns Hoffnung, dass unser Ziel, lernende Roboter für allgemeine Zwecke zu bauen, vielleicht doch möglich ist“, hebt Brøndmo hervor.